

È stata realizzata in Italia una mano robotica che percepisce il movimento e lo riproduce in modo naturale. Il risultato - pubblicato sulla rivista Science Advances, che ne ha dato evidenza in copertina - è frutto della ricerca coordinata dalla Scuola superiore Sant'Anna di Pisa con il gruppo di Christian Cipriani e condotta in collaborazione con Paul Marasco dell'Università di Cleveland e con l'Azienda ospedaliero-universitaria pisana. A permettere la percezione del movimento è un'interfaccia che, nelle protesi della mano, ripristina le sensazioni di movimento utilizzando le vibrazioni generate da magneti impiantati nei muscoli residui dell'avambraccio.
Sperimentata su un uomo di 34 anni -
L'interfaccia è stata integrata nella mano robotica Mia Hand, sviluppata dallo spin-off della Scuola Sant'Anna Prensilia, ed è stata sperimentata per sei settimane su un uomo di 34 anni con l'avambraccio sinistro amputato.
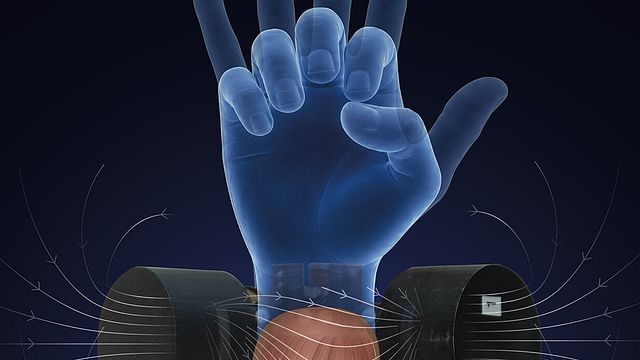
Com'è fatta l'interfaccia -
Chiamata Mkki (Myokinetic Kinesthetic Interface), l'interfaccia consiste in piccoli magneti impiantati nei muscoli dell'avambraccio e in una serie di bobine esterne che li fanno vibrare da remoto in modo mirato. In questo modo si stimolano soltanto i muscoli, ed è proprio questa vibrazione a far nascere sensazioni di movimento naturali. Il 34enne è riuscito a percepire la mano che si apriva e si chiudeva con movimenti coordinati, molto simili a quelli reali.

Gli sviluppi futuri -
Il risultato potrebbe essere "la chiave per comprendere meglio come funziona il controllo motorio umano, e per capire come ripristinarlo in persone che subiscono un'amputazione", ha osservato il primo autore della ricerca, Federico Masiero, al tempo degli esperimenti dottorando presso la Scuola Sant'Anna e oggi all'Università Tecnica di Monaco (Tum).
Il prossimo obiettivo è sfruttare simultaneamente i magneti impiantati sia controllare la protesi sia per restituire percezioni sensoriali naturali. "L'impianto era stato progettato per durare sei settimane, un tempo che ritenevamo sufficiente per una prima verifica dell'utilità e dell'efficacia dell'interfaccia. I risultati - di Cipriani - sono stati molto promettenti e ci hanno spinto a esplorare una soluzione impiantabile permanente, finanziata dal Piano Nazionale Complementare al Pnrr con il progetto Fit 4 Medical Robotics, che ci consentirà di studiare l'interfaccia su periodi molto più lunghi e con un numero maggiore di partecipanti", ha spiegato Masiero.